
Abstract
One of the problems faced by application developers for in-vehicle infotainment systems is the lack of an open and standard platform across different car manufacturers. This research investigates the suitability of a UNIX RTOS operating system to be used as a standard platform for developing an in-vehicle computerized assistant system. This integrated system will be used as both a source of information and entertainment.

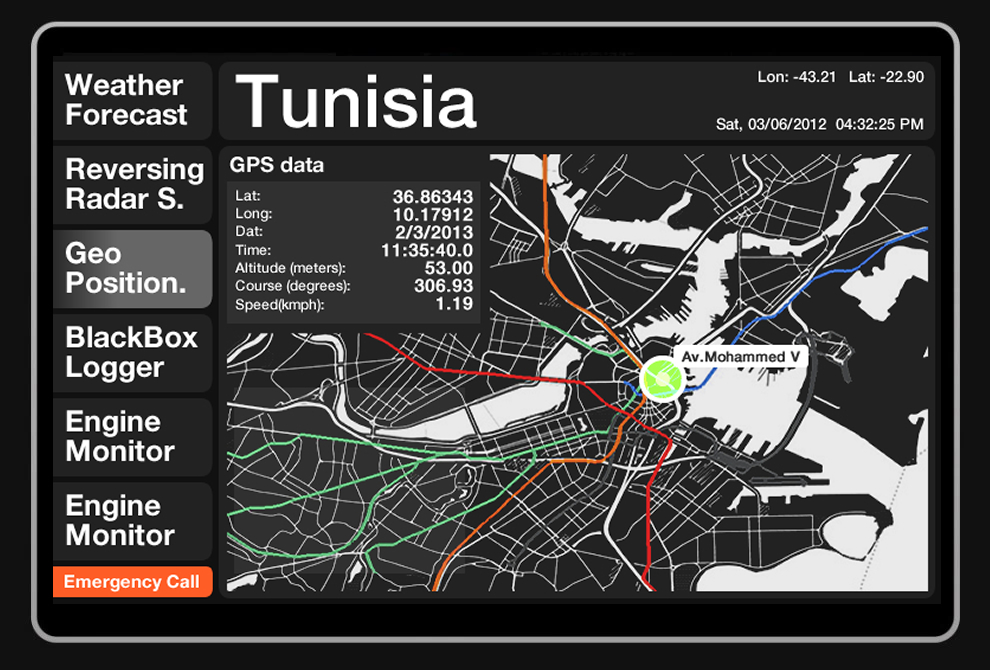
Our objective in this project is to build an integrated system that provides several car centric services to the user such as displaying weather, GPS-based navigation services, car’s sensors information, reversing radar system and many more services. This project aims to demonstrate how an OMAP board based system can be used as a stepping-stone towards establishing an open-standard in the automotive in-vehicle infotainment industry. We believe a system such as ours will help reduce the closed, proprietary and non-extensible systems being released today and bolster the design and development of open, more complete, feature-full systems in vehicles that will not only assist but also entertain drivers and passengers.

This project consisted of three main phases. Firstly, we focused research of the system requirements. Secondly, an OMAP-based system was integrated based on the requirements specification. The integration effort required several software components to be developed and tested. Thirdly, an as our methodological run is conceived, to reiterate the process, find better solutions and enlarge the scope of our final system...
Roadmap
Achieved
-
Complete LINUX operating-system running
-
Ability to run any compatible UNIX third-party application
-
Reversing Radar System
-
BlackBox recording feature
-
Accident detection and call for help
-
Anti-theft car guard system
-
Weather forecast view
Partly Working
- Voice-recognition feature
Microphone hardware is functional and has tested to be useful. However, the feature was not completed due to certain software complications regarding Google voice services and the relevant licensing requirements.
- GPS maps service
There is no stable version of the Unfloding Maps actually running on Omap devices, a stable version is actually in development and we can no longer use our Mapper library due to high canvas memory consumption and the lack of touch features
No true GPS helper is installed, the Google Service is very helpful but an offline-developed version is highly recommended.
- Road Signs recognition
For this features to work properly, it requires to map and train the system for the entire road signs panel, this will take too much time but in a large scale and wide product level this is not as much time as that.
